

How does an AC servo motor work?
An AC servo motor uses feedback control to adjust the voltage and frequency of the AC signal based on position, velocity, and acceleration information provided by a feedback device, resulting in precise and accurate motion control.
The field of robotics and automation has made tremendous strides in the last few decades. AC servo motors are one of the key components of these cutting-edge systems. These motors are efficient, versatile devices that bring precision and control to a range of applications, from industrial machinery to robotics. This article will take an in-depth look at how AC servo motors work, explaining their components, how they work, and their importance in a world of increasing automation.
What is an AC servo motor?
An AC servo motor is a control system that provides precise control of angular position, velocity, and acceleration. It consists of a suitable motor, a transducer for position feedback, and a control circuit. AC motors are driven by alternating current and, unlike DC motors, do not require a commutator, making them more reliable and efficient.
AC servo motor components
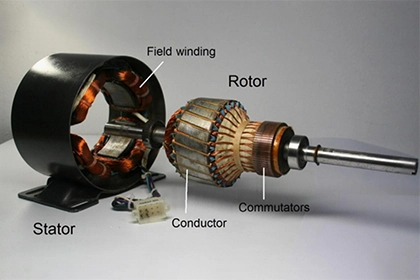
Motor: The motor part of an ac servo motor is usually an induction motor. The motor consists of two main parts: the stator, which is a stationary external part that generates a rotating magnetic field, and the rotor, which is located internally and rotates with the magnetic field.
Feedback Sensor: This part, usually an encoder or resolver, is a key component of the servo motor. It is responsible for providing real-time feedback about the position or speed of the motor. The control circuit uses this feedback to adjust the motor's output accordingly, thus ensuring precise and accurate motion.
Control circuit
The control circuit, usually a microcontroller or digital signal processor (DSP), is responsible for interpreting commands from the system and sending appropriate signals to the motor. It also handles feedback from sensors and adjusts the output of the motor as needed.
AC servo motor working principle
AC servo motors work on the principle of negative feedback control. The control circuit sends an initial current to the motor, causing it to rotate. A feedback sensor measures this rotation and sends the data back to the control circuit. If the actual position or speed of the motor is different from the expected position or speed, an error signal is generated. The control circuit then uses this error signal to adjust the current sent to the motor, increasing or decreasing the current as needed. This process is repeated in a loop, with the control circuit constantly adjusting the motor's output based on feedback from the sensors, thus ensuring precise control.
Conclusion
AC servo motors are designed to combine motors, feedback sensors, and control circuits to provide precise control of position, velocity, and acceleration. As society continues to innovate and push the boundaries of technology, the importance of understanding and improving these motors will grow every day. There is no doubt that they are a key component of our technological advancements.
Leave a Comment