

Who Invented the Servo Motor? A Journey Through History and Innovation
Servo motors have come a long way since their inception in the early 20th century. From simple devices that relied on mechanical commutation to advanced systems that use sophisticated control algorithms and advanced materials, servo motors have evolved to meet the demands of a wide range of applications. This article will explore the history of servo motors, the key innovations that have driven their development, and the latest advancements in the field.
When it comes to technological advancements, it's not always easy to pinpoint who came up with the idea first. The invention of the servo motor, for instance, is a story that involves several individuals and groups working together over time. In this article, we'll explore the history of the servo motor, how it evolved, and who played a crucial role in its development.
Where it begins
The concept of a servo motor can be traced back to the early 19th century, when scientists and inventors began experimenting with electromagnetic devices. One of the earliest recorded instances of a servo motor-like device was created by a British scientist named Michael Faraday in 1821. Faraday's device used a magnetic field to rotate a copper disc, which, in turn, caused a needle to move in response to the rotation. This was the first known example of a feedback mechanism in an electrical system.
Fast forward to the early 20th century, and we see the development of the first modern servo motor. In 1926, a French engineer named Andre-Marie Ampere invented a device that used a magnetic field to rotate a shaft, which was connected to a feedback mechanism. This mechanism used a potentiometer to measure the position of the shaft and adjust the magnetic field accordingly. The result was a motor that could maintain a constant speed and position, regardless of the load it was driving.
Enter the Brushless Servo System
The next significant development in servo motor technology came in the 1960s, with the invention of the brushless servo system. This technology replaced the traditional brushed motor with a brushless version, which eliminated the need for mechanical commutation. The brushless servo system was more efficient, reliable, and precise than its brushed counterpart, and it quickly became the preferred choice for applications that required high-precision control.
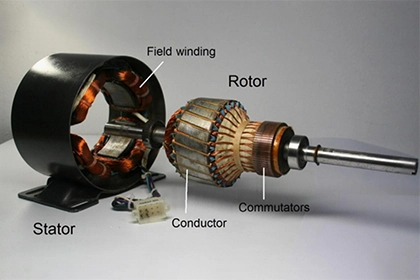
One of the key figures behind the development of the brushless servo system was a scientist named John F. Lansdale, Jr. Lansdale, who worked at the National Bureau of Standards, developed a new type of brushless motor that used a permanent magnet as the rotor and a three-phase induction motor as the stator. This design eliminated the need for brushes and commutators, which were prone to wear and maintenance. Lansdale's design became the foundation for modern brushless servo motors.
Constraints Drive Further Innovation
Despite the advancements in servo motor technology, there were still challenges that needed to be addressed. One of the main constraints was the limited power density of servo motors, which made them unsuitable for applications that required high torque and power. This constraint led to the development of new materials and technologies that could improve the power density of servo motors.
One of the key innovations that addressed this constraint was the development of rare-earth materials, such as neodymium and samarium-cobalt. These materials had stronger magnetic properties than traditional materials, which allowed for the creation of smaller, more powerful motors. The use of rare-earth materials revolutionized the servo motor industry, enabling the development of high-power, high-torque motors that were smaller and lighter than ever before.
Another constraint that drove innovation in servo motor technology was the need for more precise control. Traditional servo motors used open-loop control systems, which relied on feedback from the motor to adjust the control signals. However, this approach had limitations, as it could not account for external factors that affected the motor's performance. To address this challenge, scientists and engineers developed closed-loop control systems for servo motors. Closed-loop control systems use feedback from the motor to adjust the control signals in real-time, allowing for much more precise control over the motor's position and speed.
One of the key innovations in closed-loop control systems was the development of proportional-integral-derivative (PID) controllers. PID controllers use a combination of proportional, integral, and derivative terms to adjust the control signals based on the error between the desired and actual positions of the motor. This allows for very precise control over the motor's position and speed, making it possible to perform complex movements with high accuracy.
In addition to PID controllers, other control strategies such as model predictive control (MPC) and state-space control have also been developed for servo motors. These control strategies use advanced algorithms and mathematical models to optimize the performance of the motor and achieve even higher levels of precision and accuracy.
Another important area of innovation in servo motors has been the development of advanced motor topologies. Traditional servo motors use a simple two-phase or three-phase design, which can be limiting in terms of power density and efficiency. To address these limitations, researchers have developed new motor topologies such as the brushless doubly fed relay (BDFR) motor and the permanent magnet (PM) motor.
The BDFR motor uses a unique combination of brushless and reluctance technologies to achieve high power density and efficiency. The PM motor, on the other hand, uses permanent magnets as the rotor, which eliminates the need for brushes and commutators altogether. This results in a more efficient and reliable motor that can operate at higher temperatures and in harsher environments.
Finally, the development of advanced control systems and motor topologies has been complemented by the integration of sensors and actuators. Sensors such as optical encoders, Hall effect sensors, and current sensors provide precise feedback on the motor's position, speed, and current. Actuators such as power MOSFETs and insulated gate bipolar transistors (IGBTs) allow for precise control over the motor's torque and speed.
The integration of sensors and actuators has enabled the development of advanced servo motor systems that can perform complex movements with high precision and accuracy. These systems are used in a wide range of applications, from industrial robotics and automation to aerospace and medical devices.
In conclusion, the development of servo motors has been a gradual process that has spanned several decades. From the early pioneers of electrical motors to the advanced control systems and motor topologies of today, servo motors have come a long way. The integration of sensors and actuators has enabled the development of advanced servo motor systems that can perform complex movements with high precision and accuracy, and the future of servo motors looks bright as researchers continue to push the boundaries of what is possible.
Click and learn more about servo motor
Leave a Comment