

Differences between DC servo motor and AC servo motor
Although both DC servo motors and AC servo motors can achieve precision motion control, they have significant differences in terms of working principles, speed control methods, typical applications, costs, and maintenance requirements.
Both DC servo motors and AC servo motors are common precision control motors, but there are some differences between them, as follows:
Principle Difference
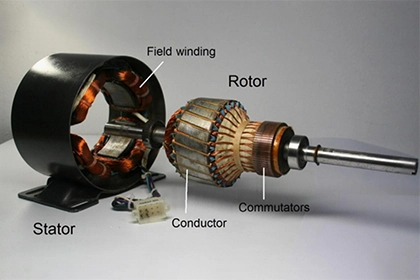
DC servo motor is powered by a DC power supply, controlling the motor's speed and direction by changing the magnetic field between the electrodes; while AC servo motor is powered by an AC power supply, controlling the motor's speed and direction by changing the direction and magnitude of the current in the armature.
Speed Control Methods
DC servo motors usually use PWM controllers for speed control, while AC servo motors typically use vector controllers or vector frequency converters for speed control.
Market Applications
DC servo motors are usually applied in fields that require high speed and precision, such as robots, automation equipment, medical devices, etc.; while AC servo motors are mainly used in industrial automation and general machinery fields.
Cost and Maintenance Costs
Generally speaking, the cost of DC servo motors is higher, but the maintenance cost is relatively low because of their simple structure and easy maintenance; while the cost of AC servo motors is lower, but the maintenance cost is relatively high because of their complex structure and higher maintenance difficulty.
Comprehensive Parameters of DC Servo Motors
The model parameters of a DC servo motor typically include the following aspects:
- Power: refers to the rated power of the motor, usually measured in watts (W).
- Rated voltage: refers to the rated voltage of the motor, usually in volts (V).
- Rated current: refers to the rated current of the motor, usually measured in amperes (A).
- Speed: refers to the rated speed of the motor, usually measured in revolutions per minute (rpm).
- Torque: refers to the maximum torque of the motor, usually measured in Newton meters (N·m).
- Encoder: refers to the type and resolution of the encoder of the motor, used to provide feedback on the motor's speed and position information.
- Interface type: refers to the interface type of the motor, usually including screw interface, flange interface, bearing interface, etc.
- Dimensions and weight: refers to the external dimensions and weight of the motor, usually measured in millimeters (mm) or kilograms (kg).
- Accuracy: refers to the control accuracy of the motor, usually measured in terms of angle or position deviation.
The parameters of DC servo motors from different brands and models may vary, so it is necessary to choose the appropriate model according to specific application requirements. At the same time, attention should also be paid to the matching of controllers and supporting equipment to ensure that the motor can operate stably and meet application requirements.
Leave a Comment